
Навигационное программное обеспечение, разработанное для миссии ExoMars, которая в 2020 году отправится на Красную планету, прошло эксплуатационные испытания на «Марсианском дворе» ESA.
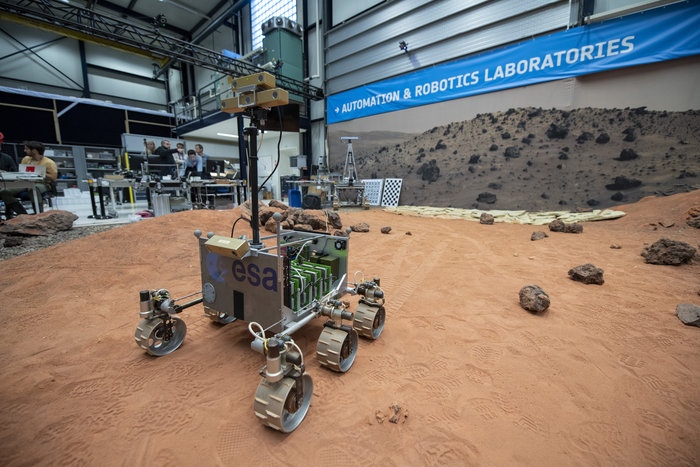
Марсоход миссии ExoMars-2020 будет перемещаться по разным типам поверхности и бурить на глубину до двух метров в поисках подсказок о прошлом планеты. Размеры испытательной версии марсохода, называемой ExoMars Testing Rover (ExoTeR), в два раза меньше летной. Во время испытаний аппарат передвигался по песчаной поверхности и среди скал Планетного испытательного полигона, названного «Марсианским двором» — площадке размером 9х9 метров, расположенной внутри Наземной лаборатории робототехники ESA в Европейском центре космических исследований и технологий ESTEC в Нидерландах.
ExoTeR тщательно рассчитывал свой маршрут и двигался со скоростью 2 метра в минуту. Это в несколько раз быстрее скорости реального марсохода ExoMars-2020, который будет проходить 100 метров за один марсианский день.
Двухдневные испытания планетохода проводились специалистами по робототехнике ESA и командой французского космического агентства CNES из Тулузы. Они обладают более чем двадцатилетним опытом работы в области автономной навигации планетоходов, кульминацией которой является разработка пакета ПО «AutoNav», управляющего движением.
В 2017 году ExoTeR был передан итальянской компании ALTEC (Aerospace Logistics Technology Engineering Company), где находится центр мониторинга и контроля за марсоходом ExoMars-2020. Это позволило команде управления провести испытания на усовершенствованном марсоходе. В декабре он снова был доставлен в ESTEC для обновления автономного алгоритма навигационной системы. После этого был проведён навигационный тест, подтвердивший исправное функционирование ПО.
Огромное расстояние от Земли до Марса приводит к задержке сигнала от 4 до 24 минут, что делает практически невозможным управление марсоходом в реальном времени. Поэтому аппарату придётся принимать собственные решения. Автономная навигация не будет посылать готовую траекторию движения, а только задавать конечную точку.
Марсоход будет создавать цифровую карту окрестностей и рассчитывать, как лучше всего достичь заданной точки. В соответствии с картой он будет выстраивать все возможные маршруты, чтобы выяснить, насколько безопасным окажется каждый из них, например, встретятся ли по дороге высокие скалы или крутая местность. Затем он пройдёт тот отрезок пути, для которого рассчитал траекторию, в конце этого отрезка он повторит тот же процесс картирования и продолжит путь.
ExoTeR, как и сам марсоход ExoMars-2020, оснащён установленными на мачте навигационными стереокамерами для цифрового картирования рельефа. По мере движения он постоянно перепроверяет свой маршрут, используя пару камер, установленных на переднем шасси.
Контроль перемещения, основанный на визуальном наблюдении, работает лучше, чем простое считывание оборотов колеса — марсоходы, бывало, застревали в песчаной дюне, и вращение колёс могло их закопать ещё сильнее, при этом движения вперёд не происходило.
ExoTeR, укомплектованный обновлённым ПО, теперь должен вернуться в итальянский ALTEC, что позволит команде управления получить опыт работы с дополнительными функциями автономной навигации до завершения создания бортового ПО марсохода ExoMars-2020. На итоговом бортовом ПО ExoMars будет два пакета ПО автономной навигации, один из которых разработан британской авиастроительной компанией Airbus.
Источник: esa.int
Перевод: Dmitry Blackfield