
Если человечество будет в будущем регулярно летать к другим телам Солнечной системы, нам потребуется довести до совершенства ряд космических технологий. Одна из них — дозаправка космических аппаратов в космосе.
С этой целью NASA создало проект Robotic Refueling Mission (RRM) — «Миссия по роботизированной дозаправке». Он представляет собой серию экспериментов, призванных испытать и усовершенствовать действие технологий роботизированной дозаправки в космосе.
В 2011 году элементы первой фазы проекта были запущены к МКС на борту последней миссии Space Shuttle — STS-135. Они были установлены на платформе на внешней поверхности МКС. С тех пор были завершены две фазы этого проекта, включавшие в себя испытания оборудования и способов перекачки топлива. С доставкой нового модуля RRM3 на МКС в конце 2018 года началась третья фаза: перекачка криогенного топлива.
Во время первой фазы RRM были испытаны операции и оборудование для заправки космических аппаратов, изначально не разработанных для дозаправки в космосе. Для этого использовались инструменты, закреплённые на канадской руке-манипуляторе Dextre, являющейся дополнением к 17,6-метровому манипулятору Canadarm2. С их помощью были удалены крышки и проволока, которые изначально не были рассчитаны на удаление на орбите.
Фаза 1 была завершена в 2013 году, после чего началась Фаза 2, оборудование для которой было запущено в 2013 и 2014 годах. Целью этого этапа работ было испытание дополнительного оборудования, в том числе «орбитальной клетки для переноса» и бороскопа (технического эндоскопа) для обследования топливопровода.
Когда «передаточная клетка» была прикреплена к модулю RRM в начале 2015 года, начались испытания по перекачке топлива, включавшие все ступени, за исключением самой перекачки. Она запланирована на RRM3.
После завершения Фазы 2 весь модуль RRM и дополнительное оборудование к нему были сняты с места своего размещения и погружены на корабль Dragon компании SpaceX для утилизации путём сведения с орбиты.
Новый модуль RRM3 имеет, по описанию NASA, размер примерно со стиральную машину. Он был доставлен на МКС на грузовом корабле Dragon в декабре 2018 года. После доставки эксперимент был перенесён на транспортно-складскую паллету 1 (Express Logistics Carrier 1).


Основное предназначение модуля — перекачка криогенного жидкого метана в условиях микрогравитации. Система должна удерживать метан в жидком состоянии с нулевым уровнем выкипания в течение полугода.
Помимо этого, RRM3 должен продемонстрировать работу компактного тепловизионного прибора, при помощи которого будут проводиться наблюдения задымлений и пожаров на Земле. Также будут испытаны алгоритмы улучшения «зрения» космических аппаратов, что может помочь в создании систем автономного сближения, а также размещения инструментов.
Основной модуль может крепиться к ферме МКС, однако его три специально построенных инструмента и пьедестал должны крепиться к самому модулю.
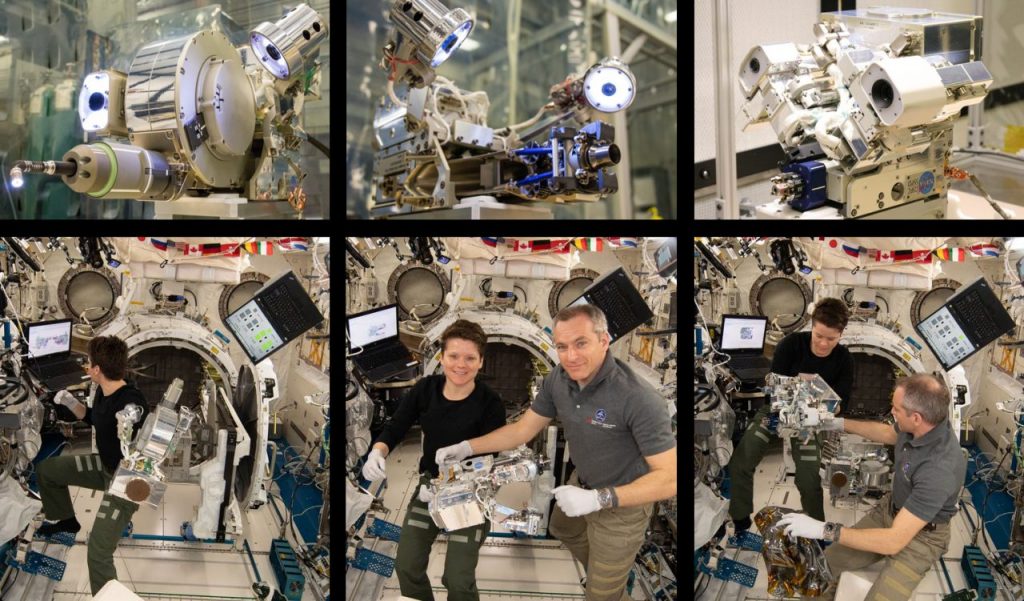
Эти инструменты были собраны астронавтом NASA Энн Макклейн (Anne McClain) и астронавтом Канадского космического агентства Давидом Сен-Жаком (David Saint-Jacques). В их числе — многофункциональный инструмент, состоящий из меньших по размеру «специнструментов» для подготовки к перекачке топлива.
Также имеется система обслуживания криогенной системы, в которую входит специальный шланг для соединения пустого топливного бака с баком с жидким метаном и камера визуальной инспекции, которая нужна для правильного взаимного расположения инструментов.
Согласно информации NASA, в основном модуле RRM3 находится жидкость, трубопроводы и баки. Когда инструменты и пьедестал будут перенесены на наружную поверхность станции через грузовой шлюз японского модуля Kibo, они будут закреплены на основном модуле при помощи «руки» Dextre.
После этого можно будет начинать основной эксперимент. По планам NASA, операции с модулем должны начаться в течение следующих нескольких месяцев. При помощи Dextre инструменты будут использованы для перекачки криогенного топлива (в данном случае — жидкого метана) из одного бака в другой.
По заявлению, опубликованному подразделением NASA по обслуживанию спутников (Satellite Servicing Projects Division), входящим в Космический центр имени Годдарда, технологии RRM3 могут пригодиться будущим исследователям Луны и Марса.
Когда будет освоена добыча местных ресурсов с их переработкой в топливо (например, получение водорода и кислорода из водяного льда), необходимо будет уметь перекачивать его из одного космического аппарата в другой.
В планах NASA по созданию окололунной орбитальной станции Gateway есть и высадка экипажей на лунную поверхность при помощи посадочных модулей, которые будут дозаправляться на окололунной орбите.
Источник: spaceflightinsider.com
Перевод: Dmitry Blackfield